机器人学基础#
1 Lecture 2#
运动学 VS 动力学:运动学描述运动而不考虑力的来源
[!note] 记号假设 小写字母 代表坐标,加粗字母 代表向量
运动信息可以用六维坐标 表示(三维是旋转,三维是平移)
为了让它变为线性变换,我们考虑齐次坐标
变换可以复合而且可逆
- Forward Kinematics:根据参数 ,计算
- Inverse Kinematics:根据 ,反解 。有可能无解,但是如果有解往往无穷多解,因为在设计自由度的时候我们会留出来一些冗余,以增加避障等灵活性
2 Leture 3#
旋转矩阵的性质
- 保长度
- 所以我们可以推出 在三维空间中,所有的刚体变换只有旋转和平移,没有手性变换(反射)。但是平移不是线性变换,所以要引入第四维形成齐次坐标。
里面的矩阵虽然是九个元素,但是其自由度只有 个,可以用 Euler Angle 来解释。
- (Yaw-Pitch-Roll)的顺序
- Yaw:绕着 轴
- Pitch:绕着新 轴
- Roll:绕着新 轴
- 但是不是一一对应,同一个旋转矩阵可以有多个 Euler Angle 与之对应,三个变量不独立,万向节死锁插值如果碰到奇异点会乱飞 也可以用 Axis Angle 来表示, 表示转轴单位向量, 代表转动角度,但是只在 上的时候是一一对应的,一旦 就会出现一对多
四元数(Quaternion):真正我们经常使用的表示方法。
其中 为实部, 为虚部 四元数乘法的性质:
- 向量形式 (Vector form):
- 乘法 (Product):
- 对于 和 ,
- 不可交换 (Not commutable)(注意:)
- 共轭 (Conjugate):
- 范数 (Norm):
- 逆 (Inverse): 所有模为 的四元数用来表示一个旋转,恰好有 个自由度。从 Axis Angle 可以直接转化为四元数 如何用四元数旋转
- 首先延长 为
- 然后共轭变换 四元数旋转可以直接复合:先 再 ,则相当于
[! note] 坐标表示 注意不同引擎下坐标顺序不同,可能是 或 。
在 上的四元数之间的距离 ,对应的旋转的夹角是 ,所以在四元数上做插值等价于在 上做插值
球面上均匀分布的采样方法,可以高斯采样然后归一化
[!summary] Why Quaternions?
- 尽量少的冗余,四个数就够用
- 乘法更简单,每次乘法 16 个乘运算+12 个加运算
- 数学性质
- 旋转矩阵连乘会因为浮点数精度损失更多
- 四元数正交化只要归一化就可以了
3 Lecture 4#
Motion Planning 可以转换为路径搜索问题:如何在无碰撞空间 里找到一条路径连接 和 ,不过该问题是在一个高维空间内的。
3.1 Collision Check#
由于维度过高,直接做搜索是不可能的。且如何确定一个 是否属于 都是困难的,这个工作称之为 Collision Check
- 我们通常使用球来做近似,因为它做碰撞检测更简单;但模拟情况下不碰撞不代表真实情况下不碰撞。碰撞十分致命,尤其对于灵巧手,没有力传感器做 Compliance ,非常容易坏。
- 更精确的是凸凸碰撞测试(convex-convex collision check),对于非凸的形状,我们用尽量少的分解 Approximate Convex Decomposition (ACD):将其转化为凸凸碰撞
3.2 路径搜索#
Probabilistic Roadmap Method
- 第一步在 里面做 sample,连接其中相邻的节点,连接起点终点,变成一个图
- sample 的算法:rejection sampling,但是 uniform sample 可能导致忽视狭窄通道,所以我们考虑 Gaussian sample(最终会贴近障碍物边缘) 和 bridge sample(最终会贴近狭窄通道)
- edge 的建立:对于每个点,只看最近的几个点就可以。这个过程是可以并行的。
- 第二步做路径搜索,如 Dijkstra
RT-based 算法
- RRT:绕着试试(exploration) 和贪婪前进(exploitation) 的结合
- RRT-connect:从起点和终点同时开搜 为了路径平滑性,我们会引入 short cutting
从 path 到 trajectory:考虑每个点到达的时间——除了路径是否可能,我们还需要考虑 dynamics 上速度、加速度是否可能。
3.3 Control System#
controller:考虑如何从当前位置 到达目标位置 ,可能会出现 over shoot 和 under shoot 以及外力干扰等,所以需要 closed-loop control
PD-controller P-term:只考虑和误差 proportion 相关,容易要么过冲要么太慢 D-term:考虑误差的导数,缓解了过冲 一般的操作是先调好 ,然后再加大 ,偶尔可能还会涉及到 对于多自由度系统的 PD control,由于关节之间是耦合的,所以我们是先分别调,合起来再调。
PID control I(积分)control term: PID control law
当时对于现代机器人学,很少用到 PID,往往 PD 就够了,因为调起来简单,且够用,而且不那么需要关注每步的误差;对于误差的过度要求,反而可能会导致不必要的动力加强(比如意外的障碍)
4 Lecture 5#
4.1 Grasping#
位置和方向
- 4-DoF grasp 也被称为 top-down grasp;只有一个方向,即 上下动
- 主要学习 6-DoF grasp,位置和方向都是 3 D 关节活动度(手指自由度)
- 平行夹爪:1 个自由度,二指夹爪看起来两个手指,但实际上只有一个自由度
- 在夹东西的时候常常是一把抓到死,即加上最大负载
- 灵巧手:最多可达 22 个自由度
6-DoF 怎么得到
- 对于已知物品(labeled):一种方法是直接给出物体的 3 D 坐标加 3 D 旋转,然后从世界坐标系转移到机械臂坐标系
- 对于未知物品(unknown):根据点云估计,泛化能力更强 但是这两种方法都是开环策略,即 control 与 grasp 分开,如果物品移动或已经碰撞到了则无法处理; 与之相对的是闭环策略,可以处理各种干扰,但是基本都需要用到大模型,可解释性不强(实际工作常常不容许半点差错,且干扰不那么多)
4.2 6D Estimation#
物体首先得是刚体,然后要确定他的标架
- 为了确定物体的 6 D 坐标,在相机内参确定时,RGB 图就足够了;
- 但是内参未知的时候,RGB 是不够的,还需要 depth(深度)得到点云
- 大部分情况下,Depth 相机获得点云就够了,RGB 不是重要的,但是对于对称性比较好的物体,RGB 是必需的。
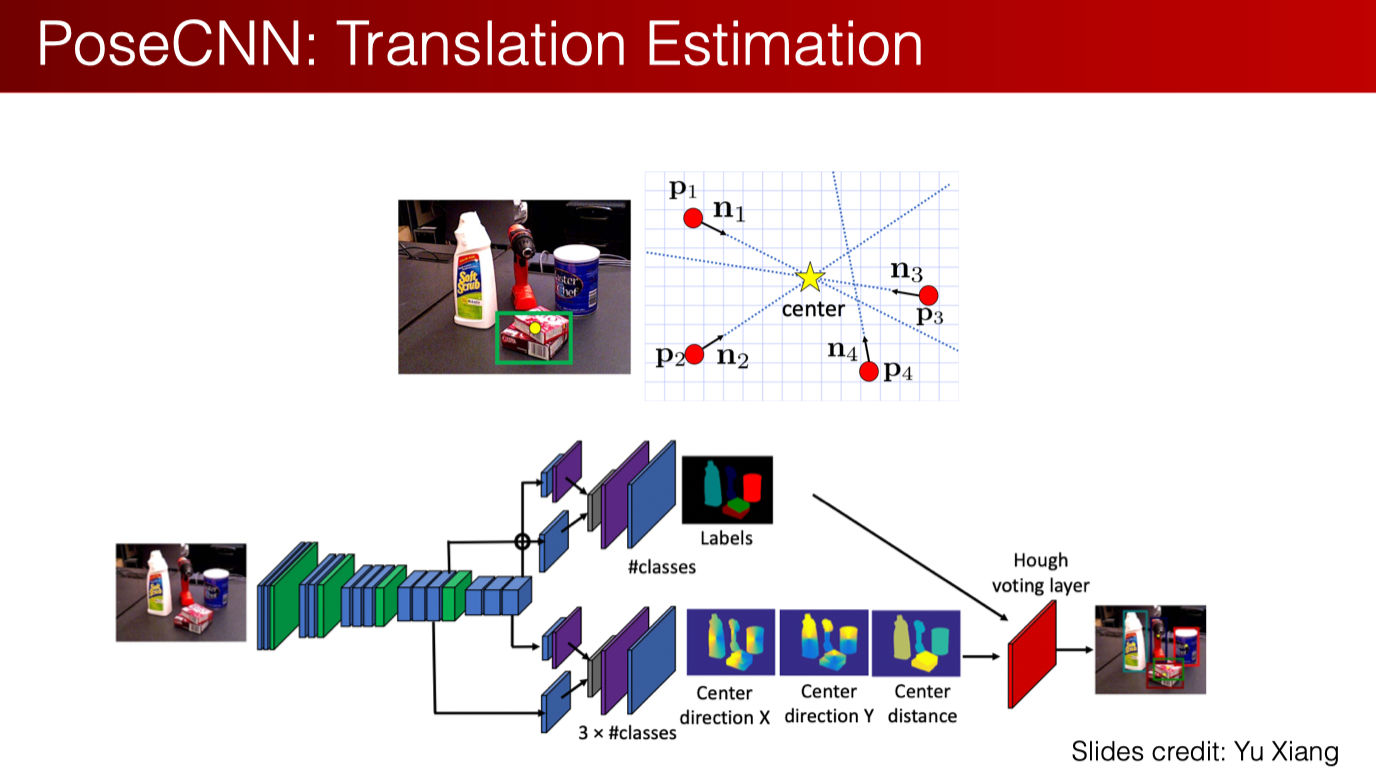
PoseCNN
-
判断平移(translation)中心
- 先判断像素属于哪个物体类别(segmentation)
- 再让像素投票判断距离中心的方向和距离
- 使用 Hough voting layer ,综合 segmentation 和投票的结果得到最终结果(相比直接卷积出结果,这样更加鲁棒)
-
判断旋转
- 与判断平移类似,但是加了一步
- 对每个物品做 ROI Pool 得到 feature map,然后再塞 MLP
实际操作中,平移和旋转的判断精度都不那么高。
4.3 Iterative Closest Point(ICP)#
- 对于已知物体,由于已经知道了它的形状和坐标,我们可以 sample 出初始点云,根据算出的 和 给出估计的新点云,将其与真实目标点云比较,迭代更新
- ICP 的 Loss 不可能做到 0,因为 1) sample 的点个数不一定相等 2)sample 是随机的
- 对于一一对应的东西,我们只需要做 SVD,然后得到一个旋转矩阵
- 对于没有一一对应的东西,我们把最近的点作为其估计(nearest estimation),估错了不要紧,因为可以反复迭代更新
- ICP 不一定迭代到最好的结果,而且 ICP 速度不快,在实时性要求高的领域很难应用。但是需要 depth,对于现实要求可能不符合。
- ICP 属于估计的 post process,本质是点云的配准;为了达到更快的收敛速度,不一定要 point-to-point,也可以 point-to-plane。
4.4 Rotation Regression#
对于旋转的判断,其目标函数可以选取 quaternion 的 L2 Loss,但是对神经网络这种连续函数,不连续点会出现很大误差。
可以证明在 以下的空间不存在到 连续的双射,可以用 维空间来预测,对其进行 SVD
4.5 Pose Fitting#
可以用坐标的 Pose-Fitting:每个像素输出其对应的 3 D 坐标(有 depth 是 3 D-3 D,否则需要相机内参),然后使用 RANSAC 并 SVD
4.6 Render-and-Compare: FoundationPose as an Example#
2D 版本的 ICP。先用基础模型粗略估计模型的坐标,然后渲染出粗略的估计,并输入下一个模块,让下一个模块猜测如何微调。 但是需要 CAD model,为了解决这个问题,我们又研究了 Category-Level 6 D Object Pose Estimation,只需要已知类别就可以泛化。
5 Lecture 6#
对于已知物体,可以采取从 Object pose 到 grasping pose 的办法,但是未知物体需要直接预测 grasping pose 开环策略指的是只能 motion plan 然后去抓,应对不了位置改变, 闭环策略指的是循环操作,可以应对 object 位置的改变
5.1 Grasp Detection#
detect 的目标:6 D(R 和 T)+1 D(开合的宽度) 如何选取 input?我们很少直接使用 image(RGB) 作为预测,而是使用 3 D 特征,比如多方向图片得到 Voxel。但是 Voxel 的精度导致太昂贵了,我们一般选取物体表面的点云来进行预测。
抓取效果
- success rate:越高越好
- Percent cleared:越高越好
- Planning time:越低越好
5.1.1 GS-Net#
GS-Net:一个常用的 Grasp detection 网络 voxel-based 的网络设计较简单:先预测 voxel 是否是抓取中心,再输出抓取预测 点云怎么办:不能只对表面猜测,而是 where + how
- where 通过 U-Net 学习哪些位置附近适合抓取,给出 graspness 评分,再进一步筛选得到前 M 个
- how:xyz+view(视线朝向)+angle(旋转角度)+depth(插入深度)一共 7 DoF,其中每一步都是在离散得到,然后分别评分
- 为什么 GS-Net 优秀?
- 抓取对象是点云,只有几何信息,与颜色无关
- 抓取本身与物体关系不大,只看局部信息,所以好泛化
- GS-Net 本身在确定抓取 angle 时只处理附近的局部信息,不看其他无关变量
- 但是 GS-Net 离散太多了,不是很自然
5.1.2 条件生成模型-Conditional Grasp Generative Model for Dexterous Hand#
但是扩散模型也很容易包含很多无关信息 所以借鉴 GS-Net 的思路,也要先选点,然后考虑点附近的局部信息。
- where:这部分和 GS-Net 差不多,也是找点然后预测是否合适抓
- how:这部分不一样,是将局部信息喂给 Diffusion 模型
5.2 抓取数据合成#
force-closure:物理上的合成方法,其核心思想是任意微小扰动都能维持抓取状态
- 所有接触点的 wrench cone 的正组合,可以覆盖整个 wrench space。
- 其中 wrench 包括力和力矩,
- 所谓 form-closure,指的是不靠摩擦,只用几何形状就锁住了物体
在 GS-Net 中,合成数据的过程其实尝试了很多 下的 force closure 来训练模型,结果发现 这种小的值效果最好,抓法也更保守。
5.3 Camera Model#
5.4 Hand-Eye Calibration#
- hand in eye: 机械臂上装了一个相机,在计算基座坐标系下位置时,要先从相机坐标系到机械臂末端坐标系,然后再从机械臂末端坐标系到基座坐标系
- hand to eye: 相机相对基座位置不变,可以直接从相机坐标系到基座坐标系
5.4.1 Hand in Eye#
为了解决这个问题,其实就是要解决 camera 到 end-effector 的坐标变换 先移动机械臂获取两方面数据:机械臂相对基座的位置和相机看到的标定板位置 根据前者,我们可以知道机械臂的变换 ;根据后者,我们可以计算出相机的变换 ,于是我们就可以算出但是从 到 的变换 不变,所以只需要解方程
5.4.2 Hand to Eye#
类似地,我们把 calibration board 放在机械臂末端,然后移动机械臂获取两方面数据:机械臂相对基座的位置和相机看到的标定板位置,但是由于标定板在机械臂末端,所以 到 的变换 是不变的,我们也可以得到类似地方程
然后再根据它得到,相机相对基座的变换